The Power Control Strategy for Mine Locomotive Wireless Network based on Successive Interference Cancellation ⋆ Lei Shi1 , Yi Shi2 , Zhenchun Wei1 , Guoxiang Zhou1 , and Xu Ding1 1
2
School of Computer and Information, Hefei University of Technology, China Bradley Department of Electrical and Computer Engineering, Virginia Tech, USA
Abstract. In a mine locomotive wireless network, multiple locomotives move along a tunnel and communicate with access points (APs) on the side of this tunnel. The underground working environment is not safe and thus it is important to maintain high quality communication links. We consider throughput maximization for a mine locomotive wireless network with successive interference cancellation (SIC) and power control. We define time segments such that within each segment, the set of locomotives that can communicate with an AP is fixed and the distance from each locomotive to this AP can be approximated as a constant. To maximize throughput for each segment, we first prove the existence of optimal solutions that satisfy certain features on SIC decoding order and SINR under SIC. Then we can formulate a linear programming problem to obtain optimal solutions. We further propose a concept of the maximum SIC set to reduce problem size and obtain a polynomial complexity algorithm. Simulation results show that our algorithm can increase throughput significantly by comparing with the algorithm using SIC only (no power control) and comparing with the algorithm without using SIC and power control. Keywords: Mine Locomotive; Interference Management; Successive Interference Cancellation; Power Control
1
Introduction
Mine locomotives have been widely used in mining industry for transporting. A typical structure of mine locomotive system is consisted with underground locomotives, access points (APs), and the ground control center, where underground locomotives will transmit their data to APs via wireless communications, and then APs will forward data to the ground control center via a backbone network. A mine locomotive is usually driven by a person to travel along the underground tunnels. However, the underground working environment is not a safe environment and accidents are happened frequently. For example, in China at least ⋆
This article is supported by the Natural Science Foundation of China (Grant No. 61370088 and No. 61501161).
2
WASA 2016
50,000 miners lost their lives from the year 2001 to 2013 [1]. Among all kinds of these incidents, at least 30% are caused by transporting systems. To build a safe working environment, we should design a robust transporting system. There are two approaches to improve transporting systems: (i) build monitoring systems for mine locomotives [2] and (ii) build unmanned locomotive systems [3]. Under both approaches, the ground control center needs realtime status of locomotives to provide timely response to any incident. Obviously the data collection, transmission and procession in a robust transporting system are largely based on the quality of communications. A robust transporting system can be built only if each locomotive data can be transmitted to APs efficiently and correctly by wireless communications. In this paper, we focus on building a wireless network for underground locomotives. Though lots of work have been done on unmanned vehicles, such as the Google car [4], there are unique challenges for the underground locomotives. Most of existing work are based on Vehicular Ad-hoc Network (VANET) [5, 6] with lots of vehicles, and the IEEE 802.11 is the most common used protocol in VANET [7], which is based on collision avoidance (CA). The CA based protocol may not be the best choice because in the underground tunnel environment, there are limited number of locomotives driving along the railway only with a predetermined schedule. Recently, many researchers have worked on the Interference Management (IM) based protocols [8]. When several transmitters transmitting simultaneously, the IM based protocols will try to decode and receive all their data while the CA based protocols will not decode any. Among several different IM techniques [9, 10], the Successive Interference Cancellation (SIC) technique [11, 12] is widely used because of easy implementation and good performance. SIC changes the physical layer behaviors, so new schemes on the upper layer should be designed to fully exploit its capability [13]. For the link layer scheduling, Lv et al. [14] designed a greedy scheduling algorithm for multi-hop ad hoc networks with SIC and showed throughput gain from 30% to 60% in simulation. Jiang et al. [16] designed an optimal algorithm for multi-hop ad hoc networks with SIC. Shi et al. [17] proposed a greedy cross-layer algorithm with polynomial complexity for SIC in a multi-hop network. Shi et al. [18] also proposed an optimal base station placement algorithm for single-hop wireless sensors networks based on SIC technique. These work all assume fixed transmission power. There is only a few work on applying the SIC technique into the underground environment. In our previous work, we aimed to maximize throughput for the underground locomotives via SIC with power control and designed an optimal locomotive moving schedule [19]. In this paper, we maximize throughput for a mine locomotive network with SIC and power control via optimal scheduling on concurrent transmissions. We make the following contributions. First, we propose a time slot based approach and prove the existence of optimal solution satisfying a particular SIC decoding order. Then we formulate a non-linear programming (NLP) problem to obtain such optimal solutions. Second, we prove the existence of optimal solution sat-
WASA 2016
Locomotive
3
AP
Coverage range for one AP
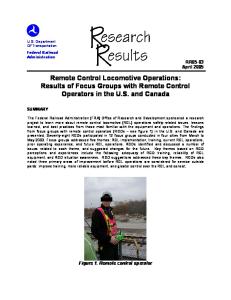
Fig. 1. The straight underground tunnel model.
isfying a particular SINR under SIC. Then we formulate a linear programming (LP) problem to obtain such optimal solutions in polynomial time. Third, we propose the concepts of maximum SIC set to further reduce complexity. Finally, we use simulation results to show that our optimal algorithm can achieve much better performance than other two schemes. The rest of the paper is organized as follows. Section 2 describes the problem and its non-linear programming formulation. We further show how to reformulate it as a linear programming problem. In Section 3, we design a polynomial-time algorithm based on the concept of maximum SIC set. In Section 4, simulation results show that our algorithm can achieve large throughput improvement than schemes without power control and SIC.
2
Mine Locomotive Wireless Networks
A mine locomotive wireless network provides communication support for locomotives by APs on the side of a straight tunnel (see Fig. 1). These APs are deployed such that there is no overlap of APs’ coverage and these APs cover the entire tunnel. Locomotives move along the tunnel and there may be multiple locomotives in an AP’s coverage at the same time. APs apply successive interference cancellation (SIC) [12] to receive data from multiple locomotives. We want to maximize throughput for locomotives. 2.1
Network Model
We focus on the problem for one AP and locomotives within its coverage. The same approach can be applied to other APs. Suppose that each locomotive li is in AP’s coverage for certain period of time [tsi , tei ] and all these time periods are within [0, T ]. Each li can apply power control and use power pi (t) ∈ [0, P ] to transmit its data at time t ∈ [tsi , tei ]. To simplify discussion, denote the coordinate of considered AP as zero. Denote xi (t) as the coordinate of li at time t. Then the distance between li and AP at time t is di (t) = |xi (t)| and propagation gain gi (t) is gi (t) = min{(di (t))−λ , 1}, where λ is the path loss index. Now we determine the communication range. Denote N0 as noise and β as the SINR threshold for a successful transmission. The maximum transmission range Rmax is achieved when the transmission power is P and there is no interference. )−λ P = β, i.e., Then we have (Rmax N0 ( Rmax =
P N0 β
) λ1 .
(1)
4
WASA 2016
We define Rmax as a locomotive’s communication range, since the transmission from li may be successful only if di (t) ≤ Rmax . Then the coordinate of li is xi (t) = −Rmax + v(t − tsi ), where v is locomotive speed. A locomotive li may not always transmit during [tsi , tei ]. We denote binary variable θi (t) = 1 if li transmits at time t and θi (t) = 0 otherwise. Apparently if θi (t) = 0, we have pi (t) = 0, i.e., θi (t) · P ≥ pi (t) (li ∈ N, t ∈ [0, T ]) , where N is the set of all locomotives Under SIC, AP can receive multiple locomotives’ data simultaneously and decode them from the strongest signal to the weakest signal [12]. Once a signal is decoded, it will be cancelled from the combined data and thus SINR for the remaining signals are increased. The SINR of li at time t under SIC can be written as γi (t) =
N0 +
gi (t)pi (t) ∑gj (t)pj (t)
gj (t)pj (t)
(li ∈ N, t ∈ [0, T ]) .
The SINR requirement under SIC is if θi (t) = 1, then γi (t) ≥ β, i.e., γi (t) ≥ β · θi (t) (li ∈ N, t ∈ [0, T ]). 2.2
Problem Formulation
In Section 2.1, we described constraints for a locomotive network with SIC. However, there are infinite number of variables, e.g., θi (t) for t ∈ [0, T ]. In this section, we consider a problem based on SIC sets, where SIC set is a set of locomotives that can transmit at the same time under SIC, and prove the existence of optimal solutions that satisfy a particular SIC decoding order. Then we can formulate a non-linear programming (NLP) problem with finite number of variables. To reduce the number of variables, we divide time [0, T ] into m small time segments such that in each time segment, (i) the set of locomotives within AP’s coverage does not change, and (ii) the distance between a locomotive in this set and the AP does not change much. Denote the set of time segments as M . By (ii), we can approximate channel gain for a locomotive li in time segment k as a constant gik . Our objective is to maximize throughput in each time segment. We now formulate an optimization problem for time segment k. Given the set of locomotives within AP’s coverage, we can determine all SIC sets (by the approach in the next section). Denote Γk as the set of SIC sets in time segment k and Skj as the j-th SIC set in Γk . We divide time segment k into |Γk | time slots and assign one time slot for each SIC set. Denote τkj as the time slot assigned to Skj and ωkj as the normalized length of time slot τkj . We have ∑ ωkj = 1 . (2) j∈Γk
WASA 2016
5
Since both the set of active locomotives and their channel gains do not change within a time slot, these locomotives do not need to change their transmission powers in a time slot. Denote pi (τkj ) as the power of li in time slot τkj . The SINR for a locomotive li in time slot τkj is γi (τkj ) =
N0 +
gik pi (τkj ) ∑ghk ph (τkj )
ghk ph (τkj )
(li ∈ Skj , Skj ∈ Γk ) .
(3)
The SINR requirement under SIC is γi (τkj ) ≥ β (li ∈ Skj , Skj ∈ Γk ) . (4) ∑g p (τ )
N0 +
gik pi (τkj ) (li ∈ Skj , Skj ∈ Γk ) . ∑ghk
(5)
6
WASA 2016
∑g
Kk ri ≤
∑
W log2 (1 + β)ωkj (li ∈ Skj ) .
(6)
Skj ∈Γk
Then the optimization problem for time segment k is max Kk s.t. (2), (4), (5), (6) pi (τkj ) ≤ P (li ∈ Skj , Skj ∈ Γk ) ,
(7)
where pi (τkj ), γi (τkj ), Kk , and ωkj are variables. This formulation is a NLP problem and is very challenging to solve. 2.3
Reformulation
Problem (7) is non-linear due to p variables in Eq. (5). Thus, we aim to remove these p variables. In this section, we focus on certain optimal solutions that enable us to determine pi (τkj ) values for a SIC set Skj in each time slot τkj . Then we formulate a linear programming (LP) problem to obtain such optimal solutions. As a starting point, we prove the following corollary. Corollary 2 Suppose that in an optimal solution φ, ˆ a locomotive li ’s SINR under SIC is larger than β in time slot τkj . Then there is an optimal solution φ with li ’s SINR under SIC equal to β in time slot τkj . Proof. Under solution φ, ˆ li ’s SINR in time slot τkj is Then we can determine a pi (τkj ) < pˆi (τkj ) such that
N0 +
gik pˆi (τkj ) ∑ghk
> β.
N0 +
gik pi (τkj ) ∑ghk
= β.
h
h
kj
kj
We construct a solution φ by changing li ’s transmission power from pˆi (τkj ) to pi (τkj ) and keeping other variables’ values unchanged. It is clear that solution φ satisfies the requirement on SINR. To show that solution φ is feasible, we only need to verify that SINR requirements are met for all locomotives in Skj . We consider the following three cases. (i) It is clear that li ’s SINR in time slot τkj is β. (ii) For a locomotive lh ∈ Skj with ghk pˆh (τkj ) ghk > gik , its SINR in solution φˆ is ≥ β. Then its SINR ∑gmk
in solution φ is
lm ∈Skj
gmk pˆm (τkj )
ghk pˆh (τkj ) ∑gmk
>
N0 +
ghk pˆh (τkj ) ∑gmk
≥ β. (iii) For a locomotive lh ∈ Skj with ghk < gik , li ’s signal will be decoded and then removed before lh ’s signal is decoded. Thus, there is no change on lh ’s SINR. With the proof for the above three cases, solution φ is feasible. � Based on Corollary 2, we can further get the following theorem.
WASA 2016
7
Theorem 2. There is an optimal solution φ satisfying the following requirement: In each time slot τkj , each locomotive li ∈ Skj has its SINR value under SIC equal to β. Theorem 2 can be proved by using Corollary 1 repeatedly, where within each time slot τkj , locomotives in Skj are checked (and transmission powers are updated if needed) by following the increasing order of their channel gains. Now we focus on optimal solution described in Theorem 2. For a set Skj , we can determine transmission powers pi (τkj ) in time slot τkj as follows. – From the farthest locomotive to the nearest locomotive in Skj , calculate gik pi (τkj ) pi (τkj ) to make γi (τkj ) = = β. ∑ghk
lh ∈Skj
ghk ph (τkj )
Note that (i) ph (τkj ) values for lh ∈ Skj and ghk < gik are already determined when we calculate pi (τkj ) and (ii) for a SIC set, the calculated all pi (τkj ) ≤ P , i.e., if any p value is larger than P , the corresponding set is not a SIC set. The complexity to calculate for transmission powers for a SIC set Skj is O(|Skj |) = O(nk ), where nk is the number of locomotives in time segment k. Once p variables are all determined, problem (7) becomes the following LP. max Kk s.t. (2), (6),
(8)
where Kk and ωkj are variables. Note that if we check all non-empty subsets (2nk − 1 subsets) to obtain all SIC sets, the complexity to obtain all SIC sets and transmission powers is O(2nk ) · O(nk ) = O(nk 2nk ) and thus the overall complexity is non-polynomial.
3
Polynomial-time Algorithm
As we discussed in the last section, a simple algorithm by checking O(2nk ) sets to find all SIC sets has an exponential complexity. To reduce complexity, we need to reduce the number of potential SIC sets. We prove the maximum number of locomotives in a SIC set. Theorem 3. The maximum number of locomotives in a SIC set is no more than P a small constant αmax = min{1 + ⌊log(1+β) βN ⌋, nk }. 0 Theorem 3 can be proved by following the idea of Theorem 1 in [19], and thus we omit the proof. By Theorem 3, we only need to check subsets with at most obtain all SIC sets. The number of these subsets is ∑αmaxαmax locomotives toαmax C(n , i) = O((n ) ). Then we have the following SIC-set algorithm. k k i=1 – Check all subsets with no more than αmax locomotives to find all SIC sets and transmission powers. – Solve (8) based on identified SIC sets.
8
WASA 2016 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. 11. 12. 13. 14. 15. 16.
//Rename locomotives such that li has the i-th smallest distance to the AP; void FindMaxSICSets() { AddLocomotive(∅, n); } //Try to add a locomotive to the current SIC set. void AddLocomotive(set S, int j) { bool FindJ=false; //indicate whether we find a locomotive that can be //added into the current SIC set. for (; j >∪0; j − −) if S {lj } is a SIC set { FindJ=true; ∪ AddLocomotive(S {lj }, j − 1); } if (FindJ==false) //the current SIC set is a maximum SIC set output S; } Fig. 2. Pseudocode for getting all maximum SIC sets.
The complexity to find all SIC sets and transmission powers is O((nk )αmax ) · O(nk ) = O((nk )αmax +1 ). For the second step, since the formulated LP has O((nk )αmax ) variables, the complexity to solve this LP is O(((nk )αmax )3 ) = O((nk )3αmax ) [21]. So the complexity of the SIC-set algorithm is O((nk )αmax +1 )+ O((nk )3αmax ) = O((nk )3αmax ), which is polynomial. Note that (nk )3αmax may still be a large number. To further decrease the complexity, we define a concept of maximum SIC set (see Definition 1) and show that we only need to consider solutions with maximum SIC sets. Definition 1. A SIC set S is a maximum SIC set if for any locomotive li which is closer to the AP than all locomotives in S, S ∪ {li } is not a SIC set. Theorem 4. For a maximum SIC set Ski and a SIC set Skj ⊂ Ski , we have (i) the data rate from each locomotives in Ski − Skj is positive in Ski ’s time slot and is zero in Skj ’s time slot; (ii) the data rate from each locomotives in Skj is the same in both Ski ’s and Skj ’s time slots. Theorem 4 can be proved by following the idea of Lemma 2 in [20], thus we omit the proof. Based on Theorem 4, it is easy to see that if we replace Skj by Ski in a solution, the new solution will have a better objective value. Thus, we only need to consider maximum SIC sets in (8) to obtain an optimal solution. We called this approach as the max-SIC-set algorithm. We now show how to find all maximum SIC sets (see pseudocode in Fig. 2). Initially, we have an empty set and then add locomotives to this set while keeping it as a SIC set. We sort the locomotives by their distances to AP, then try to add locomotives from the farthest one to the closest one. During this process, if we cannot find a locomotive lj that is closer to AP than any locomotive in a SIC ∪ set S such that S {lj } is a SIC set, then S is a maximum SIC set. Otherwise, ∪ S is not a maximum SIC set and we need to further check whether S {lj } is a maximum SIC set. The complexity of the algorithm in Fig. 2 is not easy to
WASA 2016
9
Table 1. Start times and minimum rate requirements of the 20 locomotives. i 1 2 3 4 5
tsi (s) ri (Kbps) 0 480.9 12 521.8 20 466.2 31 469.4 44 884.3
i 6 7 8 9 10
tsi (s) ri (Kbps) 57 652.3 64 489.2 73 197.8 79 178.4 92 465.4
i 11 12 13 14 15
tsi (s) ri (Kbps) 105 188.4 116 713.4 126 152.6 140 492.4 150 641.6
i 16 17 18 19 20
tsi (s) ri (Kbps) 156 237.5 165 207.8 173 436.3 188 396.8 195 785.5
Table 2. Kk values under different schemes from k = 21 to 30 time Kk (SIC k length with power control) 21 5 1.94 22 5 1.94 23 3 2.10 24 4 1.60 25 5 2.39
Kk Kk time Kk (SIC (SIC (non-SIC) k length with power only) control) 1.14 1.01 26 4 1.73 1.14 1.01 27 3 1.81 1.14 1.01 28 5 2.46 1.02 0.92 29 3 2.46 1.14 1.02 30 5 1.52
Kk Kk (SIC (non-SIC) only) 1.14 1.02 1.09 0.97 1.25 1.10 1.25 1.10 1.17 1.04
analyze. Instead, we can compare it with the approach of checking all subsets with no more than αmax locomotives to find all SIC sets. This algorithm has much less complexity due to the following two reasons. (i) We do not check all subsets with no more than αmax locomotives, i.e., once a set is identified as not a SIC set, we will not add more locomotives to this set and check whether the new set is a SIC set or not (since the new set will not be a SIC set). (ii) When we check a new set, we only need to determine the transmission power for the newly added locomotives (other locomotives’ powers are already determined) and compare it with P .
4
Simulation Results
In this section we give simulation results to show the performance of the maxSIC-set algorithm. We compare our results with the other two schemes: SIC only (no power control) and non-SIC (traditional approach). Under these two schemes, each locomotive uses the maximum power to transmit data. Similar algorithms can be designed to obtain optimal solutions under these two schemes. Consider wireless networks with 20 to 50 mine locomotives and one AP in a straight tunnel. A locomotive’s maximum transmission power is P = 1W and the noise power is N0 = 10−10 W. The SINR threshold is β = 3. The path lost index is λ = 4. Then by (1), a locomotive’s communication range is Rmax = 240m. The channel bandwidth is W = 22MHz. The minimum data transmission rate requirement ri is between 100Kbps and 1Mbps. The traveling speed is v = 5m/s. The maximum length of a time segment is 5s. The distance between two successive locomotives should be kept at least 30 meters for safety reasons. Suppose we have known all start times tsi , which are created randomly in our simulations and satisfy the minimum security distance.
10
WASA 2016
5.5
3.5 SIC with power control SIC only Non-SIC
3.25
SIC with power control SIC only Non-SIC
5
4.5 Average K
Average K
3
2.75
2.5
3.5
3
2.25
2.5
2 0
2
4
6
8 10 12 Instance number
14
16
18
2 0
20
4
6
8 10 12 Instance number
14
16
18
20
3
SIC with power control SIC only Non-SIC
2.8
2
(b) Instances with 30 locomotives
(a) Instances with 20 locomotives
3
SIC with power control SIC only Non-SIC
2.8
2.6 Average K
2.6 Average K
4
2.4
2.2
2.4
2.2
2
2
1.8
1.8
1.6 0
2
4
6
8 10 12 Instance number
14
16
18
(c) Instances with 40 locomotives
20
1.6 0
2
4
6
8 10 12 Instance number
14
16
18
20
(d) Instances with 50 locomotives
Fig. 3. Results for all network instances.
We first present detailed results of a wireless network with 20 locomotives in Section 4.1. Then we provide complete results for all network instances with different number of locomotives. 4.1
Results for a Wireless Network with 20 Locomotives
Consider a wireless network with 20 locomotives. The start times and the minimum data transmission rate requirement of each locomotive are given in Table 1. The whole schedule time T = 291s, and will be divided into 72 time segments. To show the efficiency of our algorithm, we list the values of Kk from the 21st time segment to the 30th time segment1 in Table 2 while comparing the values of Kk under the other two schemes. We also list the length of some time segments in Table 2. We can see that SIC with power control can always achieve the best performance while the non-SIC scheme always has the worst performance. To 1
We do not show result in the first 10 time slot, since there are only a few locomotives within AP’s coverage.
WASA 2016
11
Table 3. K value and improvements for the four group instances. number of K (SIC with K K improvement improvement locomotives power control) (SIC only) (non-SIC) over SIC only over non-SIC 20 3.25 2.62 2.18 123.9% 148.9% 30 3.47 2.81 2.38 123.8% 145.5% 40 2.68 2.05 1.74 130.4% 153.7% 50 2.59 1.98 1.74 131.0% 148.6%
show the overall performance over all segments, we calculate the average Kk values for all segments, which are K = 3.23 for the SIC with power control scheme, K = 2.57 for the SIC only scheme, and K = 2.07 for the non-SIC scheme. That is, the improvement on throughput by the SIC with power control scheme is 125.7% comparing with the SIC only scheme and is 156.0% comparing with the non-SIC scheme. 4.2
Results for All Network Instances
We consider networks with 20, 30, 40, or 50 locomotives, and generate 20 different network instances randomly for each network size. Then we calculate the K value for each instance under three schemes, and show the results in Fig. 3. We can see the K value for each instance by the SIC with power control scheme is improved significantly compared with the other two schemes (see Table 3).
5
Conclusions
In this paper, we designed an optimal communication algorithm for underground mine locomotive networks, where an AP receive multiple locomotives’ data by using SIC and each locomotive can tune its transmission power to maximize throughput. We proved the existence of optimal solutions that satisfy certain features on SIC decoding order and SINR under SIC, which enable us to have a LP formulation for our problem. We also proposed the concept of the maximum SIC set and used this concept to further reduce problem complexity. The designed max-SIC-set algorithm can obtain optimal solution with polynomial complexity. Simulation results showed that our algorithm can improve the throughput significantly than the other two schemes: SIC only (without power control) and non-SIC (traditional approach). In our future work, we will further design mine locomotive wireless network strategies with complicated underground tunnels.
References 1. DENG, Q.G., WANG, Y., LIU, M.J., WEI, J.J.: Statistic Analysis and Enlightenment on Coal Mine Accident of China from 2001 2013 Periods. Coal Technology. 33(9), 73–75 (2014) 2. Berglund, T., Brodnik, A., Jonsson, H., Staffanson, M., Croucamp, P.L., Rimer, S., Kruger, C.: Planning Smooth and Obstacle-Avoiding B-Spline Paths for Autonomous Mining Vehicles. IEEE Transactions on Automation Science and Engineering. 7(1), 167–172 (2010)
12
WASA 2016
3. Ge, B., Zhang, S.X.: Research on Precise Positioning Technology of Mine locomotive unmanned systems. Applied Mechanics and Materials. 397(11), 1602–1605 (2013) 4. Poczter, S. L., Jankovic, L. M.: The Google Car: Driving Toward A Better Future?. Journal of Business Case Studies. 10(1), 1–7 (2014) 5. Wang, H., Liu, R., Ni, W., Chen, W.: VANET Modeling and Clustering Design Under Practical Traffic, Channel and Mobility Conditions. IEEE Transactions on Communications. 63(3), 870–881 (2015) 6. Hartenstein, H., Laberteaux, K.P.: A tutorial survey on vehicular ad hoc networks. IEEE Communications Magazine. 46(6), 164–171 (2008) 7. Yao, Y.; Rao, L.; Liu, X.: Performance and reliability analysis of IEEE 802.11p safety communication in a highway environment. IEEE Transactions on Vehicular Technology. 62(9),4198–4262 (2013) 8. Nabil, A.; Hou, Y. T.; Zhu, R.; Lou, W.; Midkiff, S. F.: Recent advances in interference management for wireless networks. IEEE Network. 29(5), 83–89 (2015) 9. Andrews, J.G.: Interference cancellation for cellular systems: A contemporary overview. IEEE wireless communication Magnzine. 12(2) 19–29 (2005) 10. Nam, W.; Bai, D.; Lee, J.; Kang, I.: Advanced interference management for 5G cellular networks. IEEE Communication Magnizine. 52(5), 52–60 (2014) 11. Miridakis, N.I.; Vergados, D.D. A survey on the successive interference cancellation performance for single-antenna and multiple-antenna OFDM systems. IEEE Communication Surveys and Tutorials. 15(1) 312–335 (2013) 12. Zhang, X.; Haenggi, M.: The performance of successive interference cancellation in random wireless networks. IEEE Transactions on Information Theory. 60(10) 6368–6388 (2014). 13. Frenger, P.; Orten, P.; Ottosson, T.: Code-spread CDMA with interference cancellation. IEEE Journal on Selected Areas in Communications. 17(12) 2090–2095 (1999) 14. Lv, S.; Wang, X.; Zhou, X.: Scheduling under SINR model in ad hoc networks with successive interference cancellation. In Proceedings of the IEEE GLOBECOM, Miami, FL, USA, 6–10 December 2010. 15. Lv, S.; Zhuang, W.; Wang, X.; Zhou, X.: Scheduling in wireless ad hoc networks with successive interference cancellation. In Proceedings of the IEEE INFOCOM, Shanghai, China, 10–15 April 2011. 16. Jiang, C.; Shi, Y.; Hou,Y.T.; Lou, W.; Kompella, S.; Midkiff, S.F.: Squeezing the most out of interference: An optimization framework for joint interference exploitation and avoidance. In Proceedings of the IEEE INFOCOM, Orlando, FL, Canada, 25–30 March 2012. 17. Shi, L.; Shi, Y.; Ye, Y.X.; Wei, Z.C.; Han, J.H.: An efficient interference management framework for multi-hop wireless networks. In Proceedings of the IEEE WCNC, Shanghai, China, 7–10 April 2013. 18. Shi, L.; Zhang, J.; Shi, Y.; Ding, X.; Wei, Z.: Optimal Base Station Placement for Wireless Sensor Networks with Successive Interference Cancellation. Sensors. 15(1) 1676–1690 (2015) 19. Wu, L.; Han, J.; Wei, X.; Shi, L.; Ding, X.: The Mine LocomotiveWireless Network Strategy Based on Successive Interference Cancellation. Sensors. 15(11) 28257– 28270 (2015) 20. Shi, L.; Han, J.; Shi, Y.; Wei, Z.: Cross-layer optimization for wireless sensor network with multi-packet reception. In Proceedings of ChinaCom, Beijing, China, 25–27 August 2010. 21. Khachiyan, L.G.: Polynomial algorithms in linear programming. USSR Computational Mathematics and Mathematical Physics. 20(1) 53–72 (1980)